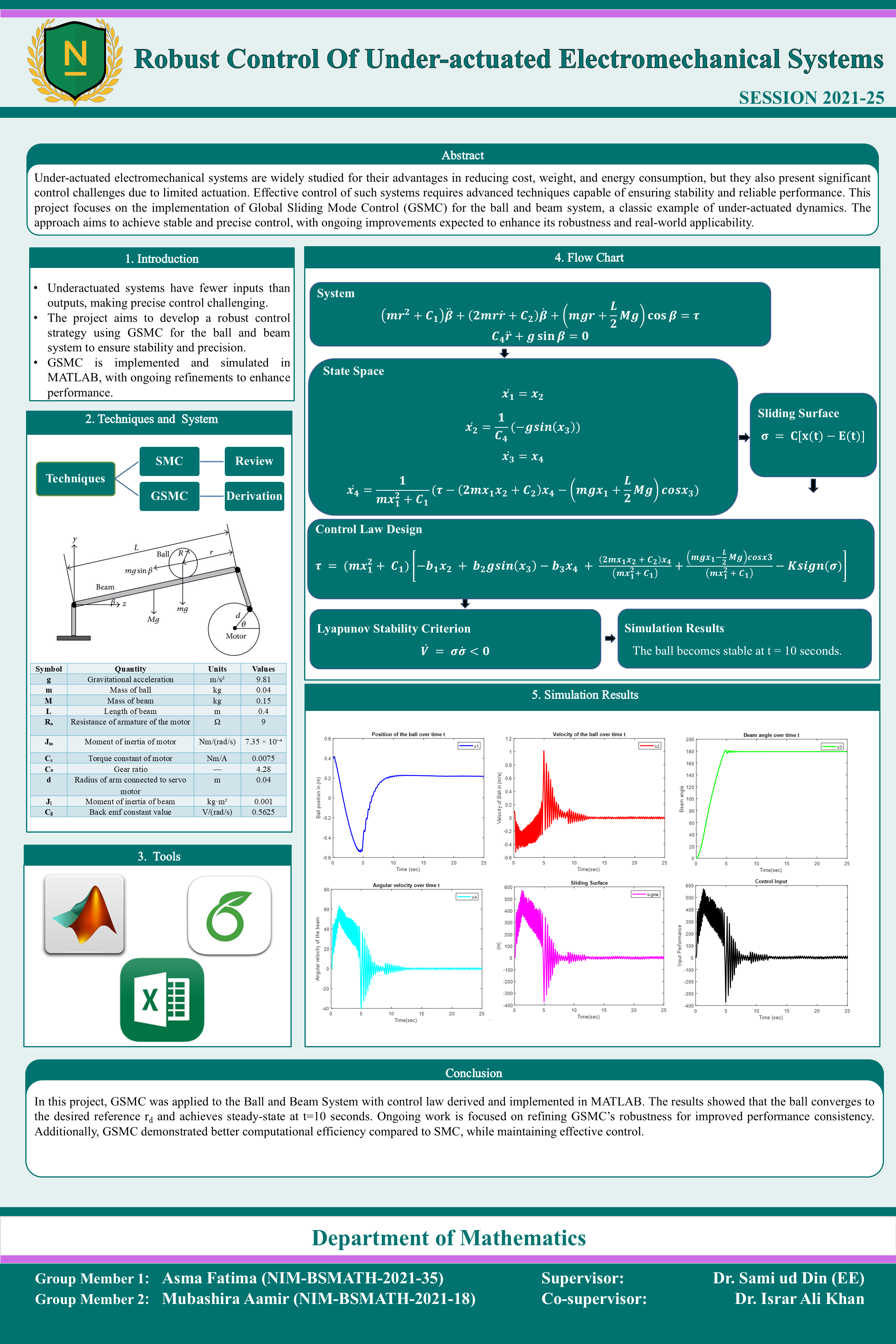
Under-actuated electromechanical systems are widely studied for their advantages in reducing cost, weight, and energy consumption, but they also present significant control challenges due to limited actuation. Effective control of such systems requires advanced techniques capable of ensuring stability and reliable performance. This project focuses on the implementation of Global Sliding Mode Control (GSMC) for the ball and beam system, a classic example of under-actuated dynamics. The approach aims to achieve stable and precise control, with ongoing improvements expected to enhance its robustness and real-world applicability.
Tools: MATLAB,Overleaf,Excel
Department: Department of Mathematics
Poster