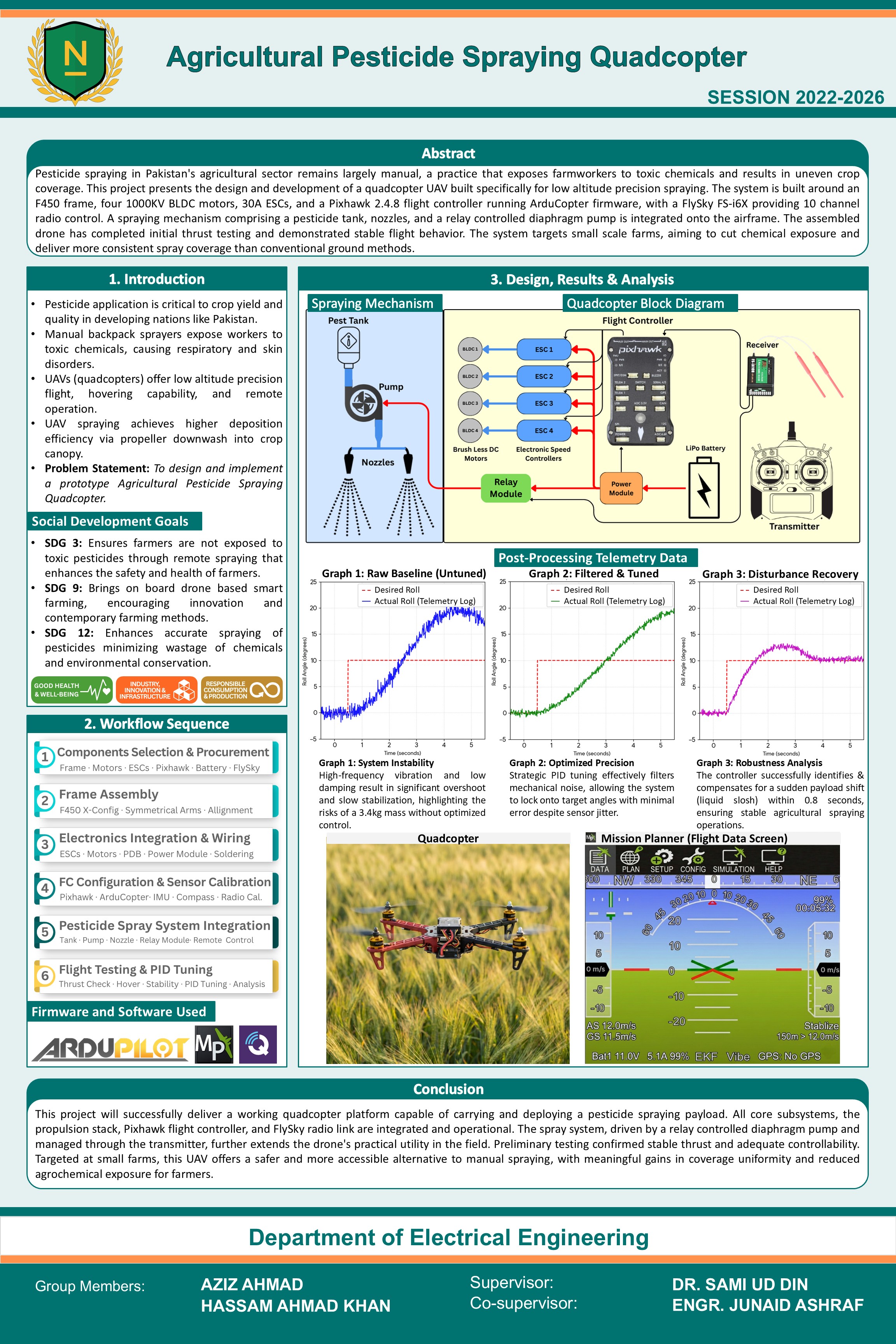
This project presents the design and development of a quadcopter UAV for low altitude spraying of pesticides in farms. The setup includes an F450 airframe and four 1000KV BLDC motors, 30A Electronic Speed Controllers (ESCs), and a Pixhawk 2.4.8 flight controller with ArduCopter’s Open Source firmware, controlled via a 10-channel FlySky FS-i6X transmitter. A custom built spraying system, including a pesticide tank, spray nozzles and a relay-driven diaphragm pump, is integrated directly into the airframe for integrated operation. The drone is designed for use in small farms in Pakistan, where traditional manual spraying methods pose risks to the health of farm workers and result in inconsistent pesticide coverage. Preliminary thrust and flight tests have shown good flight stability. The design seeks to mitigate the risk of exposure to chemicals and provide uniform spraying, at a reduced cost and greater safety compared with conventional ground based spraying.
Tools: ArduCopter Open-Source Firmware, Mission Planner, QGroundControl (QGC), PID Tuning, Thrust Testing & Motor Calibration
Department: Department of Electrical Engineering
Poster