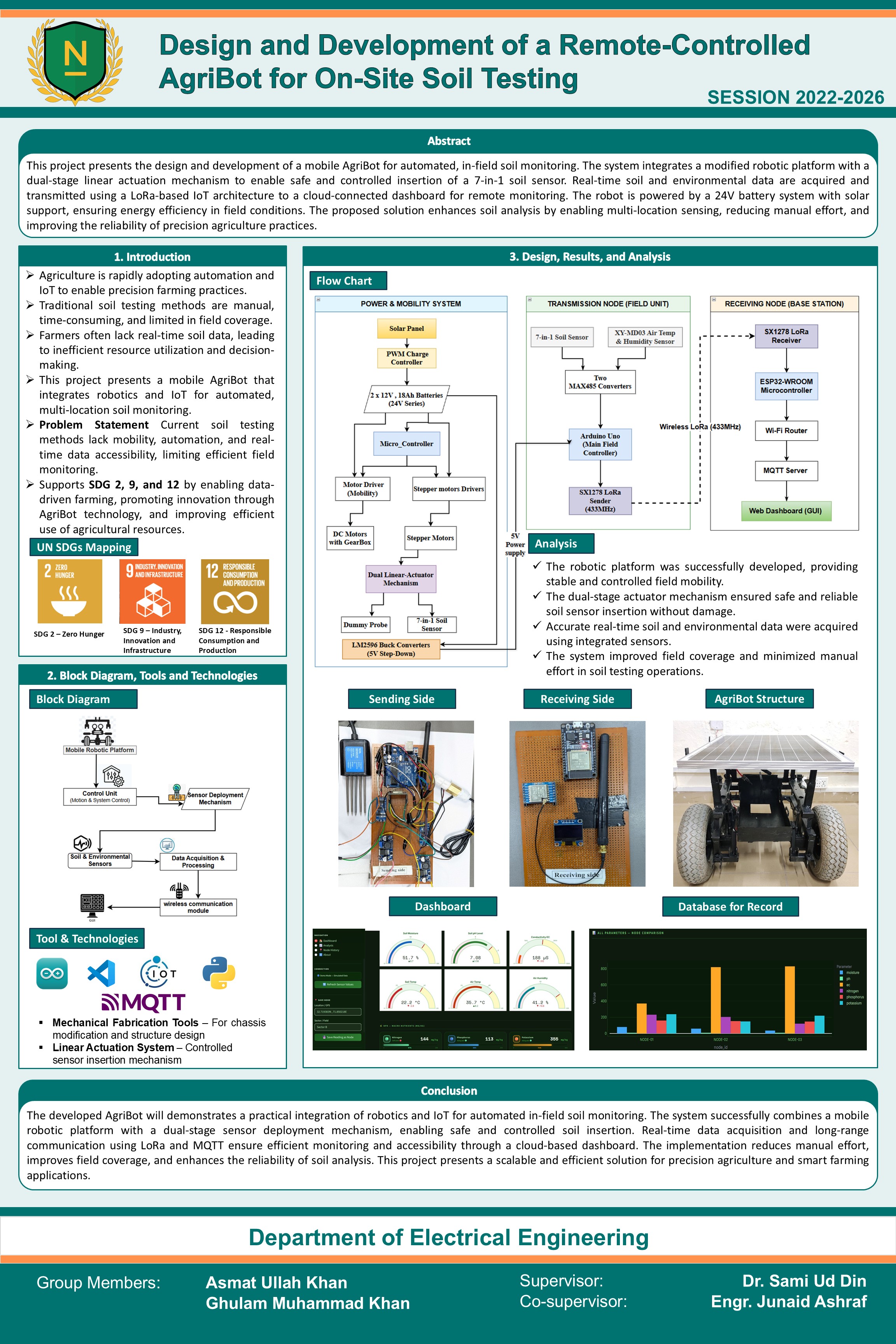
This project presents the design and development of a mobile AgriBot for automated, in-field soil monitoring. The system integrates a modified robotic platform with a dual-stage linear actuation mechanism, where a dummy probe is first inserted to prepare the soil, followed by safe deployment of a 7-in-1 soil sensor to prevent damage. Soil and environmental data are collected in real time and transmitted through a long-range wireless communication system for remote monitoring. An ESP32-CAM module is also utilized to capture and transmit images, ensuring proper sensor insertion and operational verification. The robot is powered by a 24V battery setup with solar support, enabling efficient field operation. The acquired data is finally visualized on a user-friendly dashboard, providing reliable insights for precision agriculture.
Tools: Arduino IDE , Embedded C / C++ , Microcontrollers , LoRa SX1278 Module, MQTT Server , Python , Linear Actuation System, Mechanical Fabrication
Department: Department of Electrical Engineering
Poster