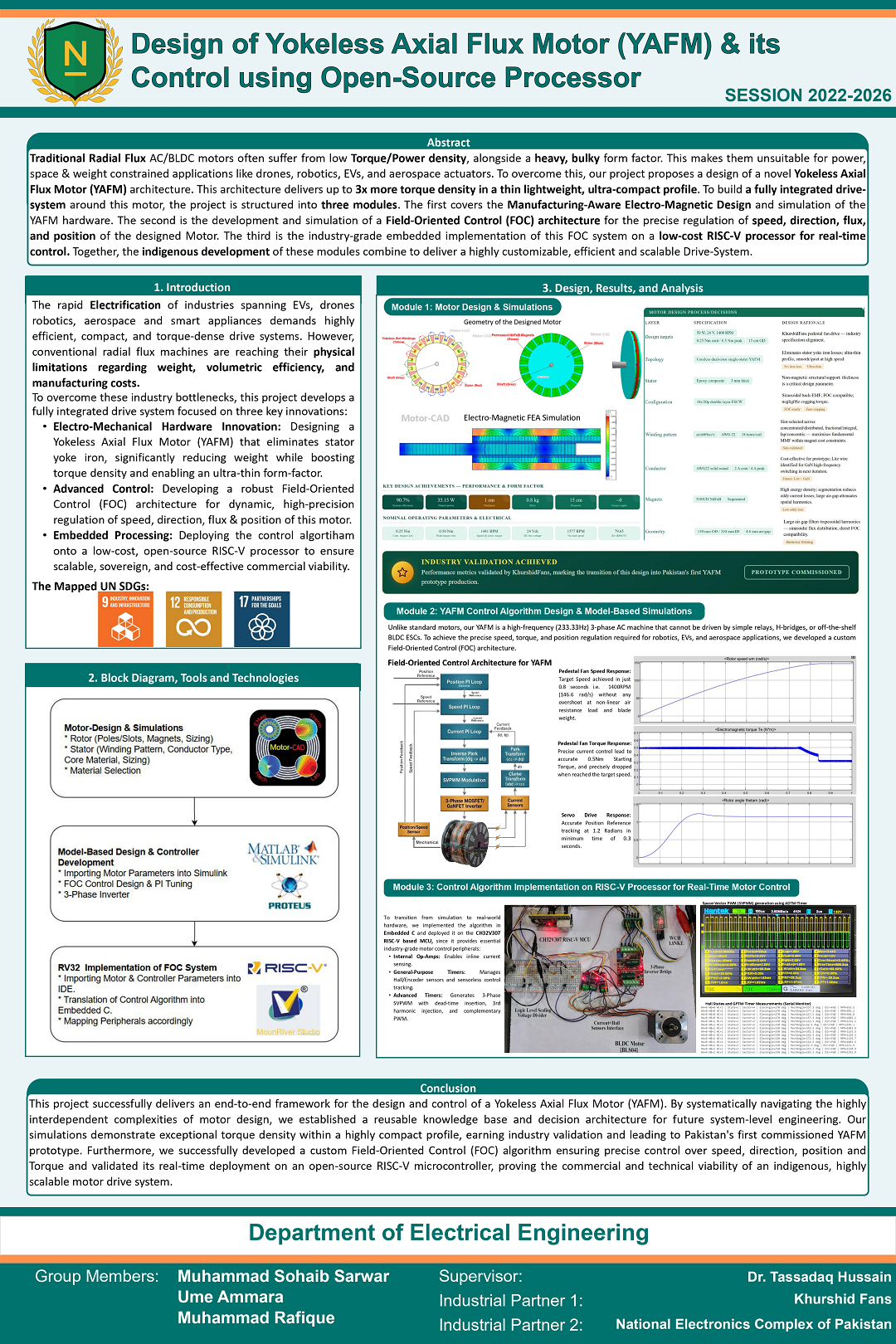
Traditional Radial Flux AC/BLDC motors often suffer from low Torque/Power density, alongside a heavy, bulky form factor. This makes them unsuitable for power, space & weight constrained applications like drones, robotics, EVs and aerospace actuators. To overcome this, our project proposes a design of a novel Yokeless Axial Flux Motor (YAFM) architecture. This architecture delivers up to 3x more torque density in a thin lightweight, ultra-compact profile. To build a fully integrated drive-system around this motor, the project is structured into three modules. The first covers the Manufacturing-Aware Electro-Magnetic Design and simulation of the YAFM hardware. The second is the development and simulation of a Field-Oriented Control (FOC) architecture for the precise regulation of speed, direction, flux and position of the designed Motor. The third is the industry-grade embedded implementation of this FOC system on a low-cost RISC-V processor for real-time control. Together, the indigenous development of these modules combine to deliver a highly customizable, efficient and scalable Drive-System.
Tools: ANSYS MotorCAD , MounRiver Studio, MATLAB/Simulink, Proteus, FEA, Field Oriented Control (FOC), RISCV, Microcontroller
Department: Department of Electrical Engineering
Poster